德科学家研制现实版终结者机器人手臂(图) 转贴
来源:百度文库 编辑:超级军网 时间:2024/05/02 05:51:26
德科学家研制现实版终结者机器人手臂(图)
2011年01月28日 07:58 新浪科技
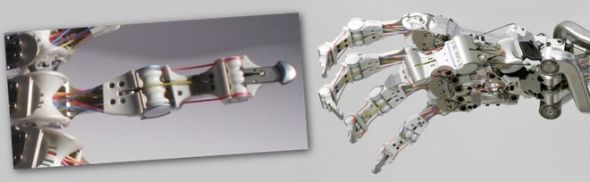
机器人手指由38根腱控制,每一根腱由前臂内部自带的发动机驱动,每个关节由2根腱组成
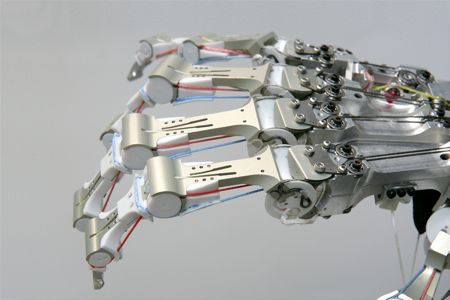
这只机器人手臂拥有惊人的活动范围和功能

在实验中,研究人员用一根棒球棒猛烈击打这只机器人手臂,结果手臂完好无损

拥有如此功能的完整机器人,足以像科幻电影中的机器人一样对人类进行奴役,征服人类
新浪科技讯 北京时间1月28日消息,看 德科学家研制现实版终结者机器人手臂
媒体来源:新浪科技
过《终结者》系列电影的观众可能都会震惊于其中未来机器人的强大功能,并产生过恐惧心理。当然,那些机器人只是科幻电影中的角色。不过,德国机器人与机械电子研究所科学家近日成功研制出一种功能惊人的机器人手臂,或许可以看作是现实版终结者机器人的最初部分。
这只机器人手臂拥有惊人的活动范围和功能。它的手指由38根腱控制,每一根腱由前臂内部自带的发动机驱动,每个关节由2根腱组成。当发动机启动时,这些关节就可以进行相应方向的运动。当发动机转向相反方向时,这些关节也会进行调整。这只机器人手臂不仅仅可以抓住皮球,而且柔韧到可以完成许多精细的操作。
在实验中,研究人员用一根棒球棒猛烈击打这只机器人手臂,结果手臂完好无损。除了可以承受如此猛烈的打击外,这只机器人手臂还拥有许多惊人的功能,比如它的手指可以产生30牛顿的压力,可以完成刺激按摩,手指抓紧时可以使人窒息死亡。此外,它的动作相当敏捷、灵活。它的关节每秒种可以旋转500度。如果它将弹簧收紧至各个腱都结合到一起的程度,然后再释放,此时关节的旋转速度可达每秒2000度(约合每分钟333转)。
拥有如此功能的完整机器人,足以像科幻电影中的机器人一样对人类进行奴役,征服人类。不过,德国机器人与机械电子研究所项目负责人马库斯-格雷本施泰因表示,这还未实现他们的目标,他们计划制造一个拥有两条这样手臂的简单机器人。尽管有人对其目的产生质疑和担忧,但格雷本施泰因坚称他们只是在实验中学习。(彬彬)德科学家研制现实版终结者机器人手臂(图)
2011年01月28日 07:58 新浪科技
机器人手指由38根腱控制,每一根腱由前臂内部自带的发动机驱动,每个关节由2根腱组成
这只机器人手臂拥有惊人的活动范围和功能
在实验中,研究人员用一根棒球棒猛烈击打这只机器人手臂,结果手臂完好无损
拥有如此功能的完整机器人,足以像科幻电影中的机器人一样对人类进行奴役,征服人类
新浪科技讯 北京时间1月28日消息,看 德科学家研制现实版终结者机器人手臂
媒体来源:新浪科技
过《终结者》系列电影的观众可能都会震惊于其中未来机器人的强大功能,并产生过恐惧心理。当然,那些机器人只是科幻电影中的角色。不过,德国机器人与机械电子研究所科学家近日成功研制出一种功能惊人的机器人手臂,或许可以看作是现实版终结者机器人的最初部分。
这只机器人手臂拥有惊人的活动范围和功能。它的手指由38根腱控制,每一根腱由前臂内部自带的发动机驱动,每个关节由2根腱组成。当发动机启动时,这些关节就可以进行相应方向的运动。当发动机转向相反方向时,这些关节也会进行调整。这只机器人手臂不仅仅可以抓住皮球,而且柔韧到可以完成许多精细的操作。
在实验中,研究人员用一根棒球棒猛烈击打这只机器人手臂,结果手臂完好无损。除了可以承受如此猛烈的打击外,这只机器人手臂还拥有许多惊人的功能,比如它的手指可以产生30牛顿的压力,可以完成刺激按摩,手指抓紧时可以使人窒息死亡。此外,它的动作相当敏捷、灵活。它的关节每秒种可以旋转500度。如果它将弹簧收紧至各个腱都结合到一起的程度,然后再释放,此时关节的旋转速度可达每秒2000度(约合每分钟333转)。
拥有如此功能的完整机器人,足以像科幻电影中的机器人一样对人类进行奴役,征服人类。不过,德国机器人与机械电子研究所项目负责人马库斯-格雷本施泰因表示,这还未实现他们的目标,他们计划制造一个拥有两条这样手臂的简单机器人。尽管有人对其目的产生质疑和担忧,但格雷本施泰因坚称他们只是在实验中学习。(彬彬)
未来残疾人的福音啊!
光手臂没意思啊~~要整体的重装杀人机器~~~
好像是哈工大和德国宇航中心联合研制的。
机器人绝对不会奴役人类,只会消灭人类
研究负责人 名字 叫 马库斯 啊············
不错,好东西,哈尔滨那2个大学赶快山寨!
ufxy 发表于 2011-1-28 12:58 
Are you sure?
Are you sure?
阿诺大叔内纽曼面
哈工大五指机器人“牵手”德国总理
哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。



哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。
关于哈工大的机器人手,发个链接自己看。
http://news.hit.edu.cn/articles/2010/06-18/06154135.htm
新一代仿人五指机器人灵巧手与德国总理握手
发布时间:2010-6-18 17:08:50 阅读数:7434
哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。
关于哈工大的机器人手,发个链接自己看。
http://news.hit.edu.cn/articles/2010/06-18/06154135.htm
新一代仿人五指机器人灵巧手与德国总理握手
发布时间:2010-6-18 17:08:50 阅读数:7434
哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。
新一代仿人五指机器人灵巧手与德国总理握手
发布时间:2010-6-18 17:08:50 阅读数:7434
哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。
发布时间:2010-6-18 17:08:50 阅读数:7434
哈工大报讯(陈兆芃/文)在刚刚落下帷幕的柏林国际航空航天展览会中,由我校机器人研究所和德国宇航中心机器人及机电一体化研究所联合研制的新一代仿人五指机器人灵巧手HIT/DLR II,在德国总理默克尔的注视下完成了打开关闭空气阀门、修复太阳能板等一系列高难度动作。随后默克尔总理与空间遥操作机器人亲切握手,并由衷赞叹。与此同时,另一个位于慕尼黑的仿人机器人正在忙碌,机器人的左手稳稳地抓起一个杯子放到前台,右手紧握冰淇淋勺,轻快的舀起冰淇淋精确地放入杯中。在惊奇的眼光中,来宾拿起冰淇淋开始品尝。这是在德国慕尼黑机器人及自动化博览会上由五指机器人灵巧手所完成的众多操作之一。
机器人灵巧手是智能机器人的关键部件之一,它不仅可以安装在机器人手臂上,在复杂、危险的太空环境中完成精确操作,从而代替宇航员长时间在危险环境中完成维修、安装等工作,还可以集成于地面机器人,在核、生、化等危险环境中从事探测、取样、装配、 修理作业等。另外,机器人灵巧手还可以为人工智能、遥操作以及抓取规划等方面的科研工作者提供良好的实验平台,并应用于服务性机器人中为人们提高日常生活的质量,具有广阔的应用空间。
在上一代机器人灵巧手HIT/DLR I的基础之上,我校机器人研究所“长江学者“特聘教授刘宏教授带领德宇航-哈工大(HIT/DLR)联合机器人实验室完成了新一代仿人五指机器人灵巧手HIT/DLR II的设计工作,并成功应用于空间机器人、臂手联合操作系统和机器人肌肉控制系统等多个科研项目当中。HIT/DLR II机器人灵巧手是新一代多传感器、高度集成的机器人灵巧手。该灵巧手有5个手指,多达15个自由度。每个手指有3个自由度,4个关节,每个手指能提起1千克的重物。所有的驱动、传动、传感及电气模块均集成在灵巧手手指和手掌中,具有多种感知、集成化、模块化、数字化以及实时控制等特点。机械手的尺寸与人手相仿,整体质量1.8千克,小于国内外的同类机器人灵巧手。该项目先后获国家自然科学基金和国家“863”高科技项目资助。其驱动机构、传感器以及驱动与控制系统等已获多项国家发明专利。HIT/DLR II 仿人灵巧手荣获2010年度德国国家设计奖提名和国际IF设计奖等多项国际奖项。
该灵巧手在慕尼黑和柏林两地的展出均引起了极大关注。在本次柏林国际航空航天展览会和慕尼黑机器人及自动化博览会中共有6只机器人灵巧手参与了展出。同样由该实验室设计的新一代小型五指手也参与了展出,并引得当地媒体争相报道。小型五指手具有5自由度15个转动关节,外形仿生,体积约为正常人手的85%, 重量约400多克。小型五指手的控制采取肌电控制与自主抓取控制相结合的控制策略,可实现对人手10种抓取动作的识别,并控制小型五指手根据所识别出的动作平稳可靠的抓取物体。
“到底是由于智慧才产生了手,还是由于手而引发了智慧“,亚里士多德在千年以前关于智慧的探讨凸显出机器人灵巧手在机器人及人工智能领域的深远意义。而HIT/DLR II机器人灵巧手的研制成功以及其国际化的应用成果,正突出地显示了我校在世界机器人研究领域的技术水平和国际学术交流的影响力。
关于哈工大的机器人手发个链接自己看。
http://news.hit.edu.cn/articles/2010/06-18/06154135.htm
http://news.hit.edu.cn/articles/2010/06-18/06154135.htm
xiaofusheng721 发表于 2011-1-28 12:18
对残疾人来说会不会太重了
对残疾人来说会不会太重了
dada904 发表于 2011-1-28 13:59
玩过质量效应吗?里面的GETH设定有点意思
玩过质量效应吗?里面的GETH设定有点意思
这个强度可能还不够啊,不过有了具体活动样板,材料会上去的
残疾人的福音啊

这两个不是一个研究所的(就本贴所提供的文档来看)
主贴是:德国机器人与机械电子研究所
跟帖是:我校机器人研究所、德国宇航中心机器人及机电一体化研究所
主贴是:德国机器人与机械电子研究所
跟帖是:我校机器人研究所、德国宇航中心机器人及机电一体化研究所
德方都是DLR。